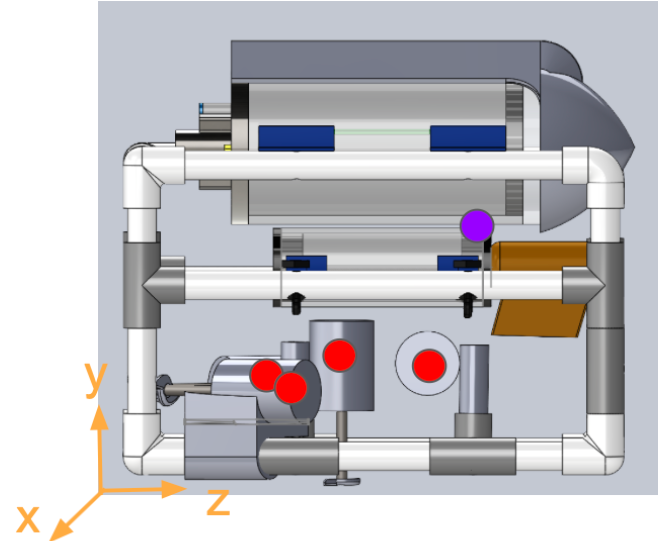
For underwater vehicles class (ENG 100-600), we were tasked with designing and building a semi-tetherless ROV that could navigate offshore wind turbine risers and inspect for any damage. The overall goal was designing a simple ROV prototype that had high-maneuverability and access to several degrees of freedom without sacrificing speed in order to complete its challenge quickly. We placed 2nd in the riser inspection time trial.

Team Members : Andrew Beute, Nadeesha Fernando, Monica Mendoza, Rachel Oliver, Alec Jamil