Sep 25 - Dec 25 (Siemens NX, Teamcenter, Small-scale design, DFM, DFA)
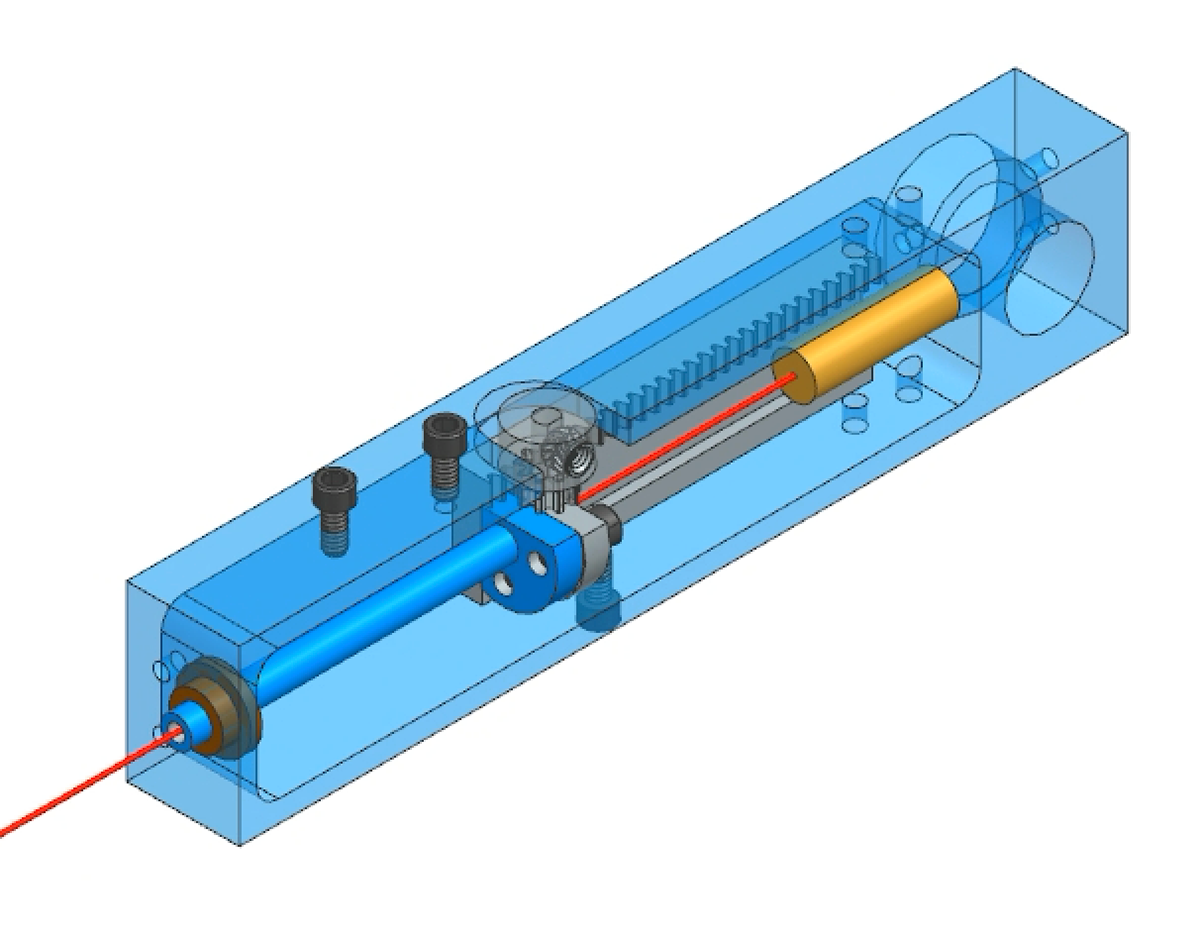
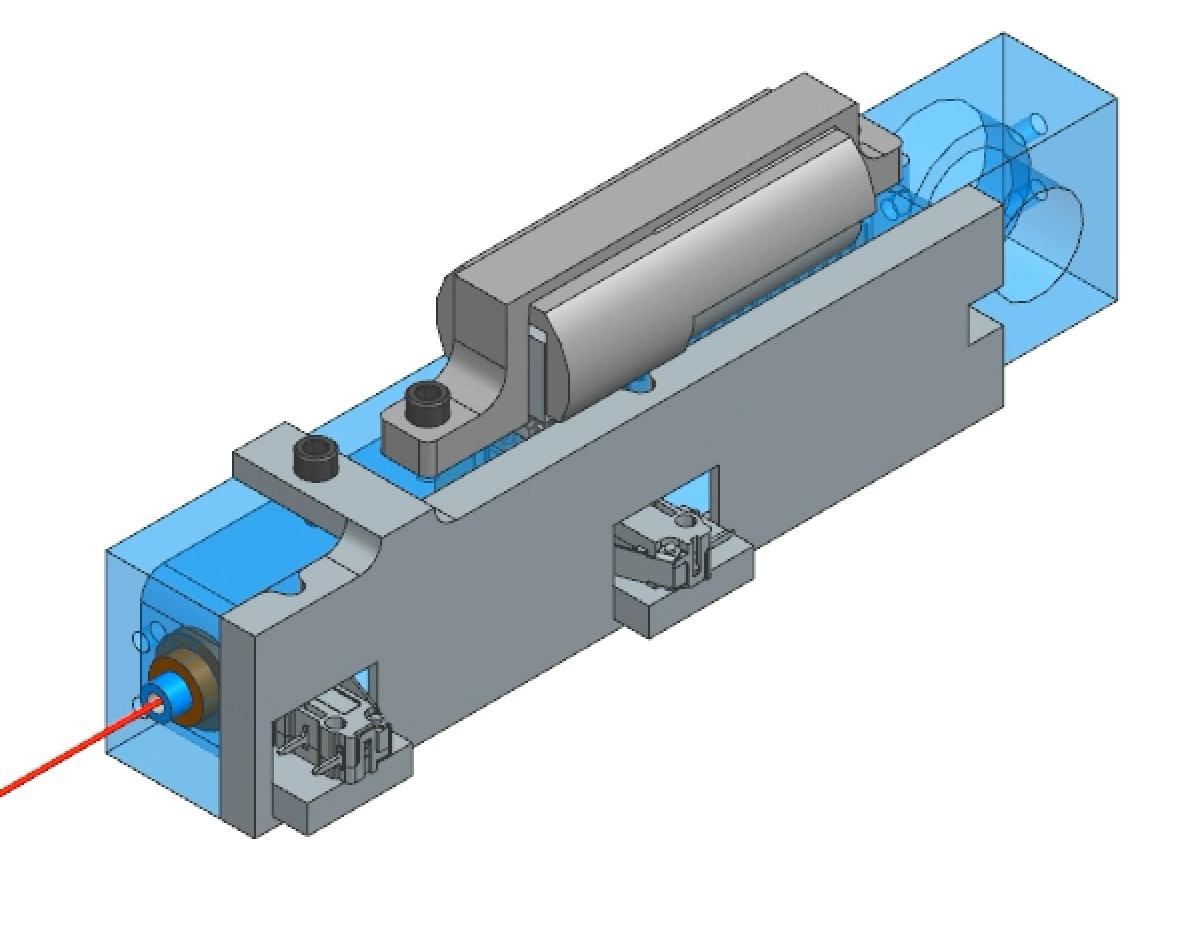
For the Michigan Mars Rover team, I worked with a small group on developing a pusher for the mars rover robotic arm. The goal of the pusher was to press down keys on a keyboard so the mars rover could be used to send messages. The specifications of the design project were to include a laser pointer that the autonomous control could use to see which key the finger was going to press, and to be all contained within a 1" x 1" x 6" space while achieving maximum range of extension.
We presented various candidate options to solve the problem, using belt and pulley, and rack and pinion systems to convert the rotational motion from the motor into linear motion.
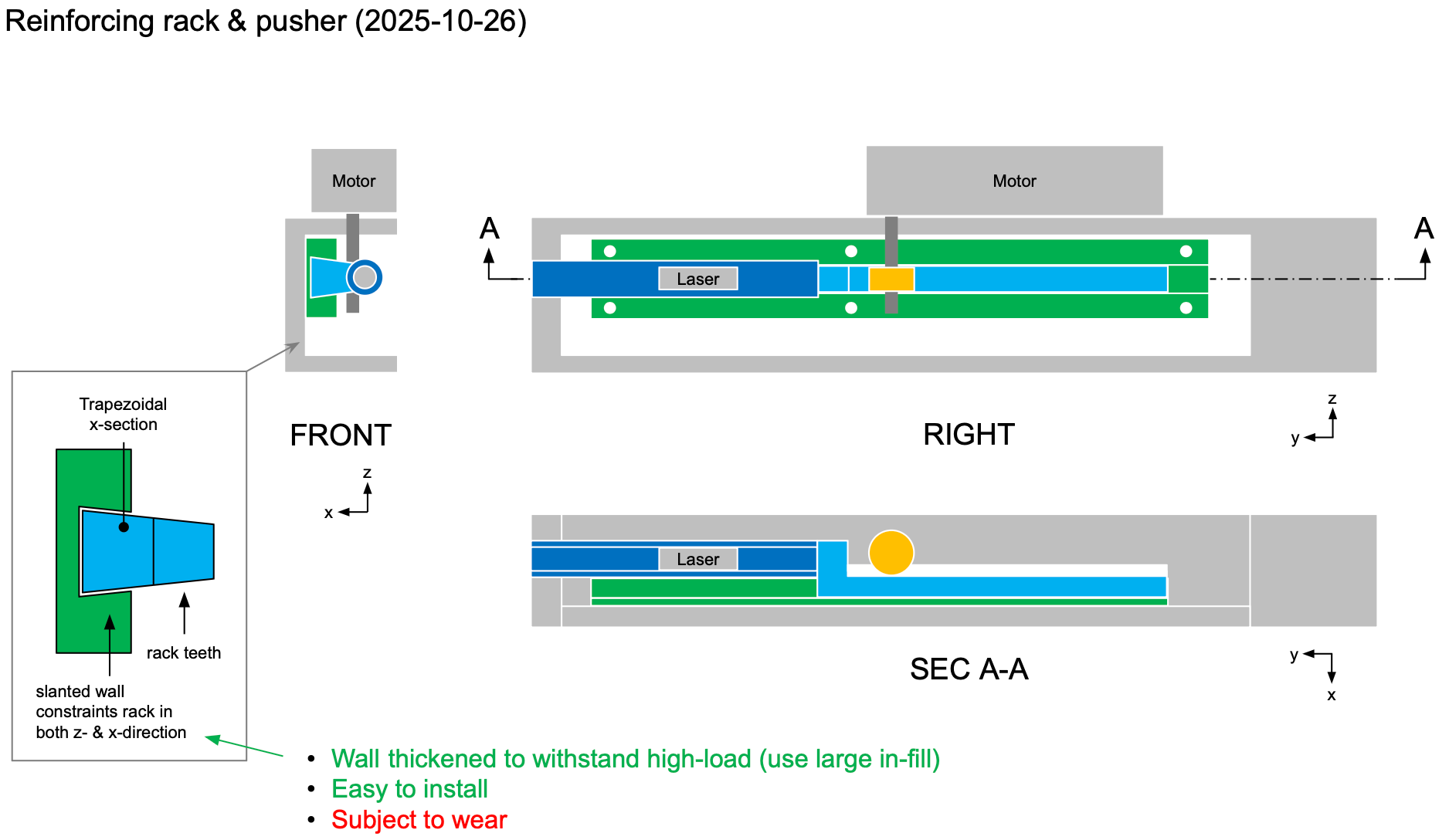
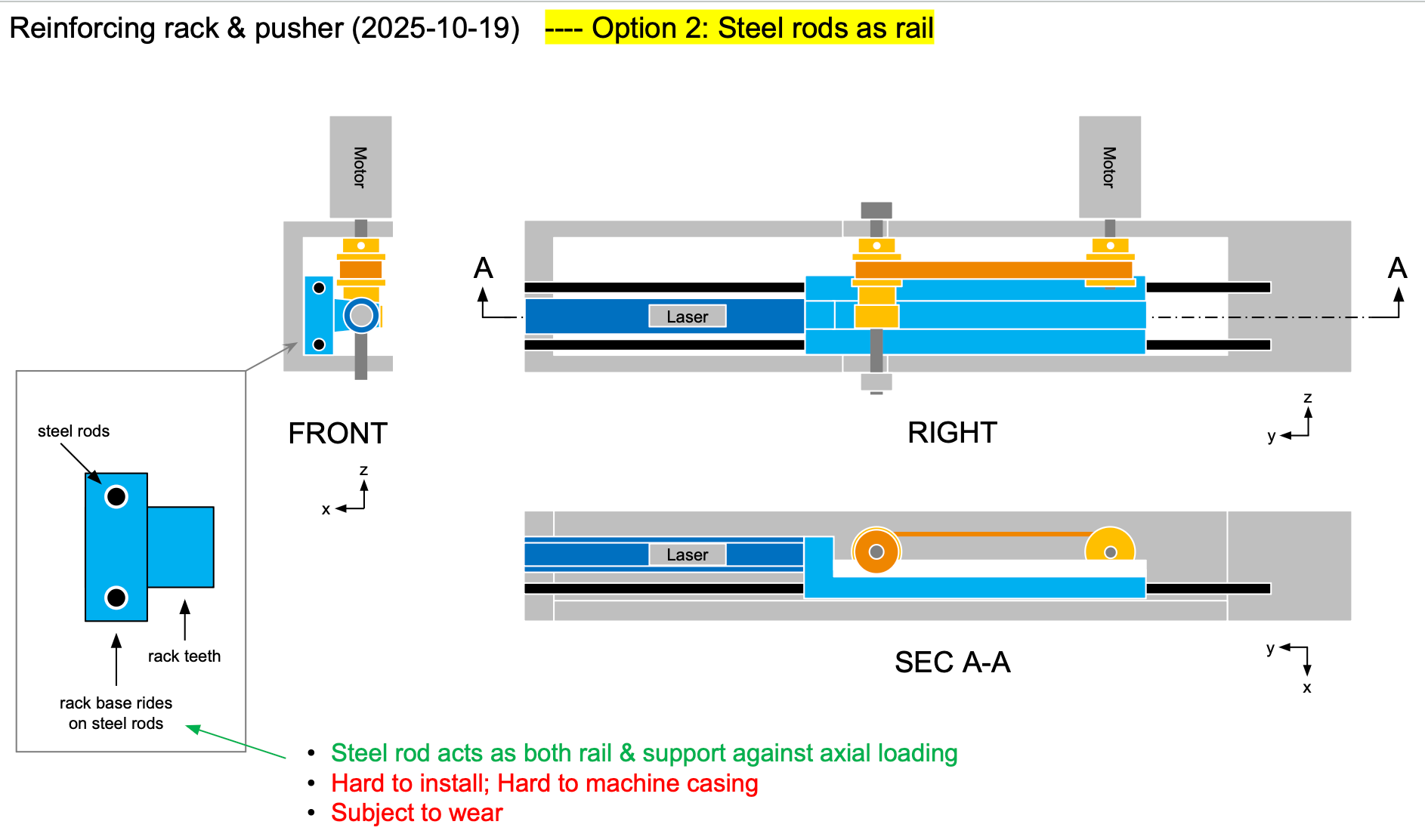
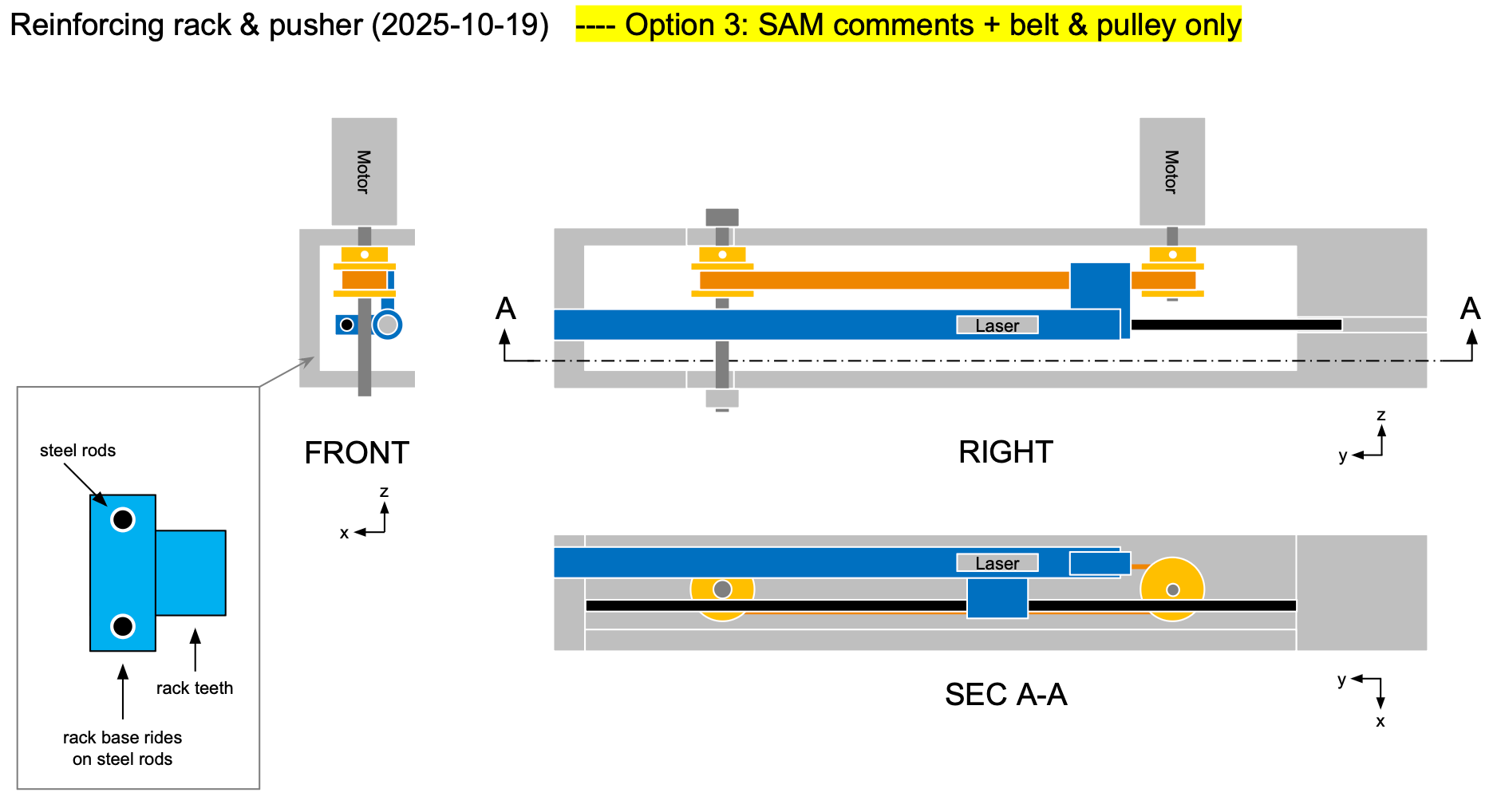
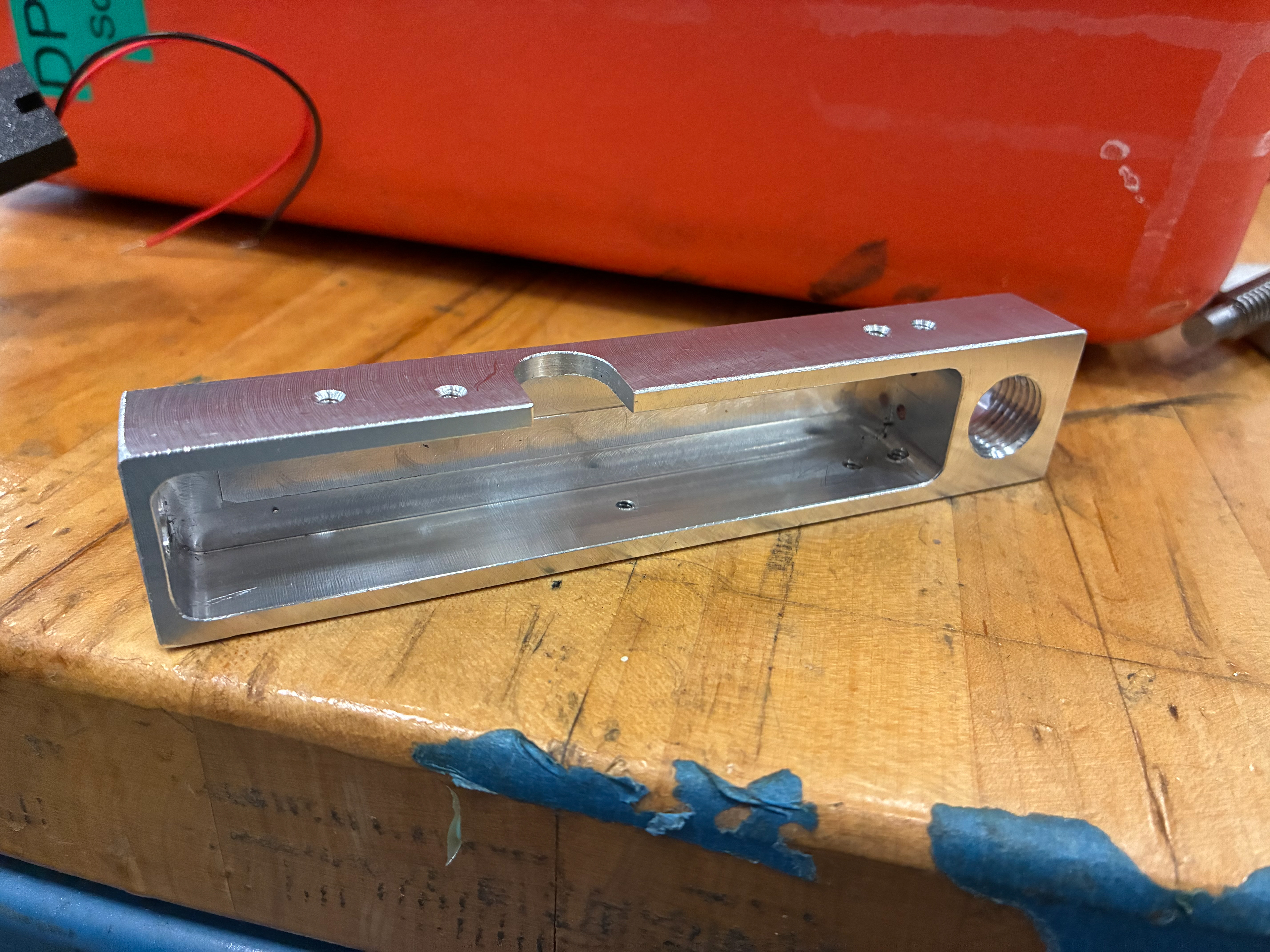
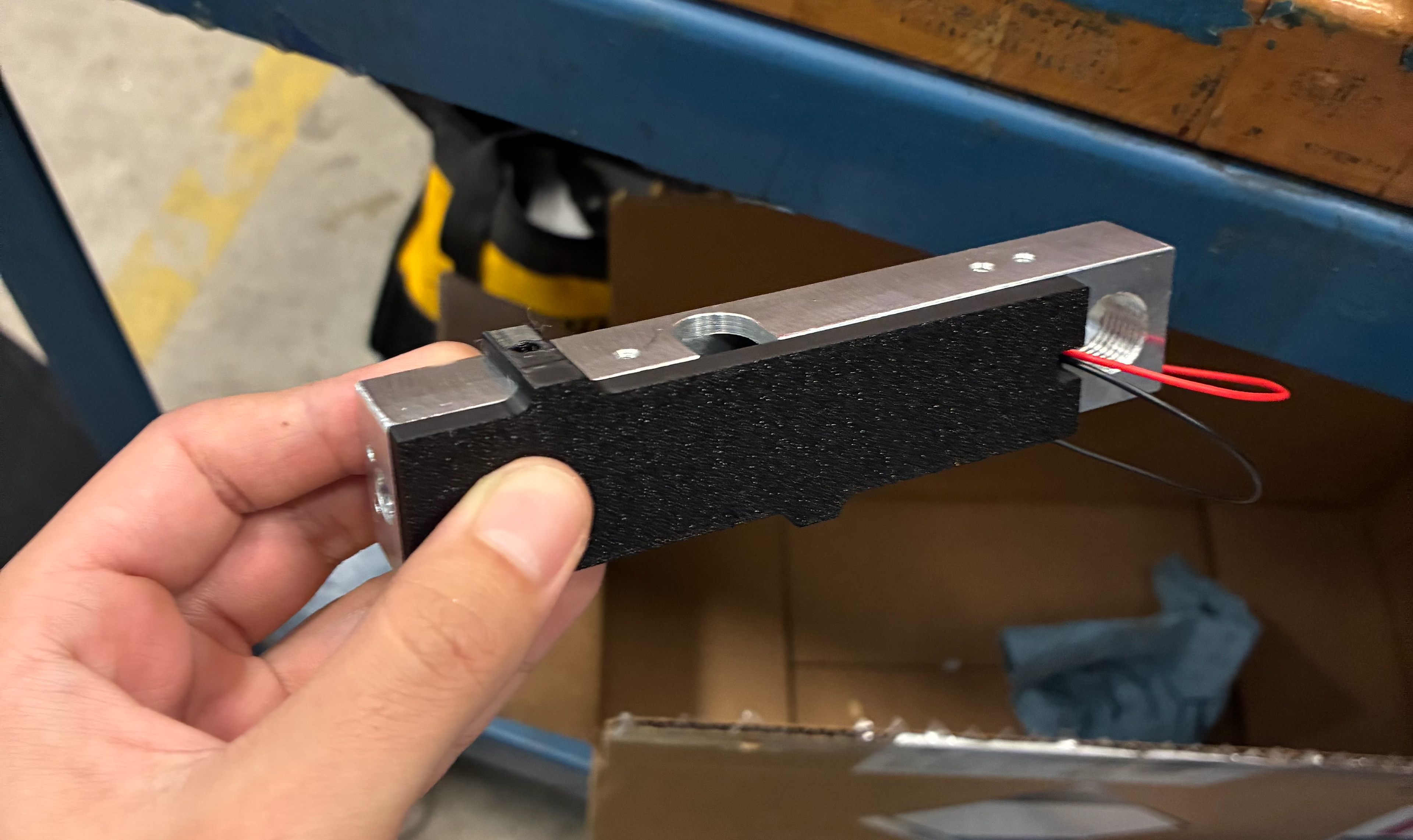
After many design reviews and DFM reviews, we landed on a design utilizing a rack and pinion system supported by two steel rods running down the length of the finger to provide support. We were concerned with a failure stemming from a point load on the fully extended pusher, which is why we used steel rod supports to handle that force. The finger was manufactured out of aluminum using a mill along with some 3D printed (non load bearing) parts.
Team Members: Theodore Guo, Felipe Tacaoca, John Zhang, Alec Jamil